

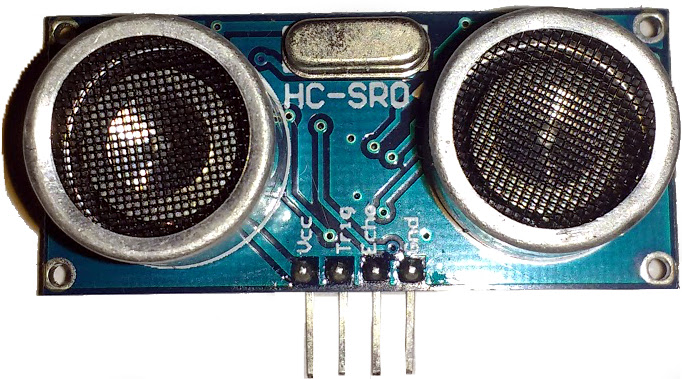
El robot evasor de obstáculo detecta obstáculos que se encuentran enfrente de él y cambia su rumbo para evitar una colisión. Para medir la distancia se usa un sensor HC-SR04 el cual emite una señal (Trigger) que retorna (echo) después de un tiempo. A mayor tiempo de retorno, mayor distancia.
0. Material Necesario
| Cantidad | Nombre |
| 1 | Sensor HC-SR04 |
| 2 | Llanta con motor y moto-reductor |
Conexión:
El pin trigger del sensor se conecta a la terminal 5 del puerto Digital-3 de la tarjeta.
El pin echo del sensor es conectado a la terminal 6 del puerto Digital-3 de la tarjeta controladora.
El pin vcc del sensor se conecta a 5v
El pin GND a tierra del circuito.
1. A través del modelador, usar el modelo por defecto:
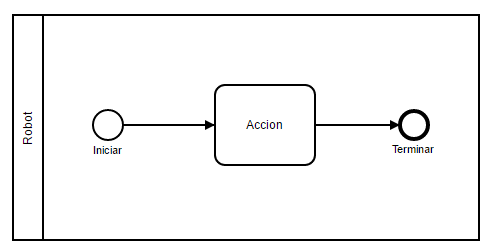
2. Asignación de pasos en las actividades
En las actividades correspondientes, copiar el siguiente código:
$trigger = 11;
$echo = 10;
$distancia = 0;
$max = 0;
mientras(1){
$distancia = 0;
apagar($trigger);
udormir(2);
encender($trigger);
udormir(10);
apagar($trigger);
$max = 0;
mientras(leer($echo) == 0 && $max < 1000){
$max = $max+1;
}
mientras( leer($echo) == 1 && $distancia < 1000){
$distancia = $distancia + 1;
}
si ($distancia > 10 && $distancia < 1000) entonces {
adelante();
arrancar();
}sino{
si($distancia < 1000 )entonces{
detener();
dormir(150);
atras();
arrancar();
dormir(150);
detener();
dormir(150);
izquierda();
arrancar();
dormir(150);
detener();
detener(700);
}
dormir(150);
}
}
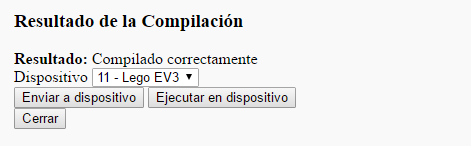
3. Enviar el código al dispositivo:
a. Dar clic en el avión de papel

b. El resultado debe ser "Compilado Correctamente". Seleccionar el dispositivo y dar clic en el botón "Ejecutar en dispositivo"