

Un robot seguidor de luz detecta la intensidad de luz a través de dos foto-resistencias, si la diferencia de luz en las dos foto-resistencias es considerablemente alta, el robot gira hacia la dirección donde hay mayor iluminación. El robot seguidor de luz podría ser usado en conjunto con otro robot iluminado para realizar un robot seguidor-perseguidor.
0. Material Necesario
| Cantidad | Nombre |
| 2 | Foto-resistencia LDR |
| 2 | Resistencia de 10K |
| 1 | Protoboard |
Conexión:
Uno de los extremos de la foto-resistencia se conecta a 5V el otro extremo se conecta a la resitencia de 10K. Por ultimo el extremo libre de la resistencia se conecta a GND (Tierra). Del pin que une la resistencia y foto-resistencia se conecta un cable a los puertos análogos 0 y 1 de la tarjeta.
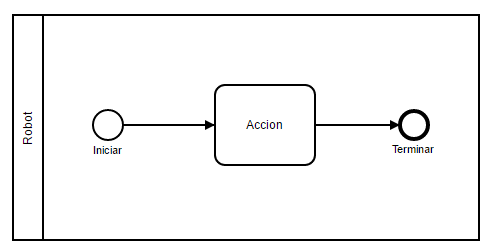
1. A través del modelador, usar el modelo por defecto:
2. Asignación de pasos en las actividades
En las actividades correspondientes, copiar el siguiente código:
$umbral = 600;
$umbral_arranque = 30000;
$diferencia = 0;
mientras(1){
$izq = leeranalogo(1);
$der = leeranalogo(0);
si ($izq > $der) entonces{
$diferencia = $izq - $der;
}sino{
$diferencia = $der - $izq;
}
si($diferencia < $umbral) entonces{
adelante();
}sino si ($izq < $der) entonces{
derecha();
}sino{
izquierda();
}
si ($izq > $umbral_arranque || $der > $umbral_arranque) entonces {
arrancar();
}sino{
detener();
}
}
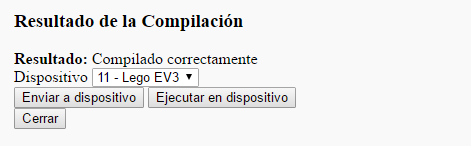
3. Enviar el código al dispositivo:
a. Dar clic en el avión de papel

b. El resultado debe ser "Compilado Correctamente". Seleccionar el dispositivo y dar clic en el botón "Ejecutar en dispositivo"