

Preparación del Robot
- 1. Ir a Descargas
- 2. Descargar el archivo "Firmware para microcontrolador PIC 18F4550"
- 3. Descomprimir el archivo descargado usando alguna aplicación como PeaZIP, 7ZIP o similares
- 4. Trasnferir el archivo "maquina_virtual.hex" al micro-controlador usando una herramienta como el Pickit 2 o el Pickit 3
Registro en la plataforma
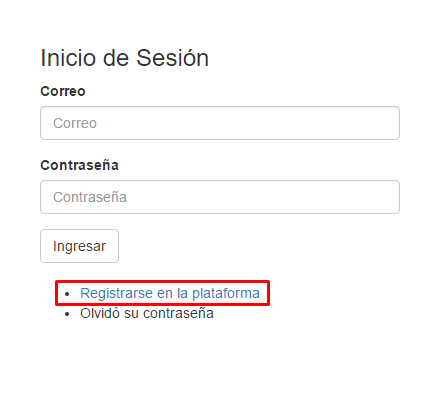
- 1. Acceder a la plataforma
- 2. Dar clic en registrarse en la plataforma
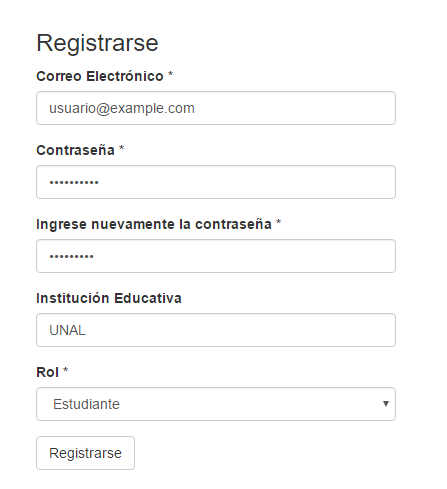
- Llenar los campos solicitados y dar clic en Registrarse
Acceso la plataforma
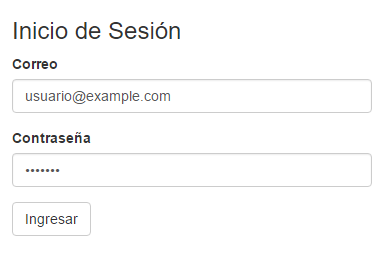
- 1. Acceder a la plataforma
- Escribir el correo electrónico y la contraseña provistas en el registro
Registro del robot en la plataforma
- 1. Ir a la pestaña Dispositivos
- 2. Dar clic en el botón Agregar Dispositivo
3. 3. Llenar los campos:
- Nombre: Contiene un texto que nos permitirá reconocer de manerá clara nuestro dispositivo.
- Código de Acceso: Es la contraseña que le suministraremos a la interfaz de comunicación para hacer la conexión con el dispositivo robótico.
- Tipo de Dispositivo: El tipo de plataforma robótica que estamos registrando. Lego EV3, PIC 18F4550 o Beagle Bone Black.
Dar clic en el botón Registrar Dispositivo. Se asignará un ID que puede ser consultado en el listado de dispositivos.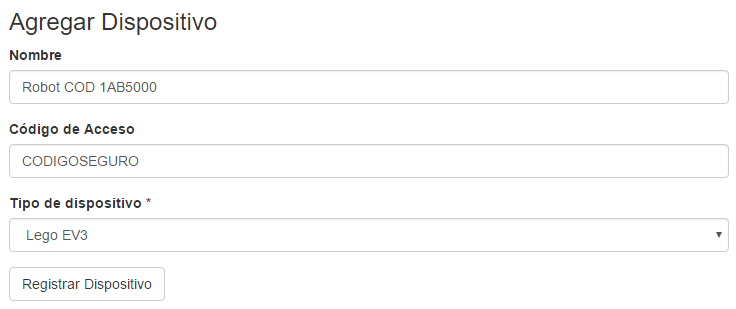
Instalación de la interfaz de comunicación
- 1. Descargar e instalar Python 3
- 2. Ir a Descargas
- 3. Descargar el archivo para el sistema operativo "Windows de 64 bits para PIC 18F4550"
- 4. Descomprimir el archivo descargado usando alguna aplicación como PeaZIP, 7ZIP o similares.
- 5. Ejecutar el archivo task_mng
- 6. Ingresar:
- ID: Código ID de dispositivo
- Código: Código de acceso del dispositivo
- Url: Dejar la opción por defecto como http://roboe.abth.co/app/
Dar clic en el botón Ingresar.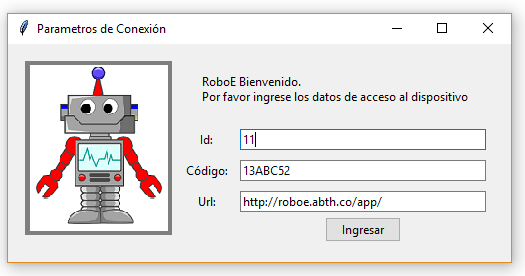
- 7. Desconecte toda fuente de alimentación que tenga la tarjeta. Identifique los puertos COM que están presentes con la tarjeta desconectada. Conecte a través del puerto USB el micro-controlador al computador mientras presiona el botón Load de la tarjeta. Seleccione el puerto nuevo que apareció en el listado. Este es el puerto en el que se conectó el dispositivo robótico y de clic en el botón Escuchar solicitudes.
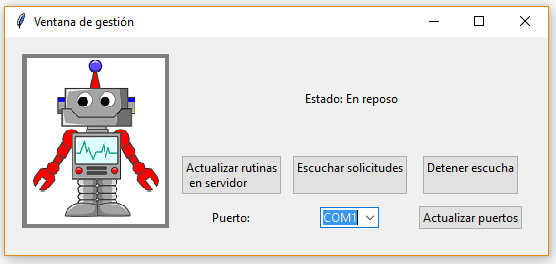
- 8. Cuando se envíe una nueva rutina al robot, la interfaz de comunicación se encargará de realizar el proceso de carga al micro-controlador.